CUDA LiDAR point cloud pre-processing
Overview: LiDAR point cloud data obtained from one of the major automotive OEM suppliers has been processed through our implementation of CUDA pre-processing kernels.
Technologies: CUDA, ANSI C, OpenCL
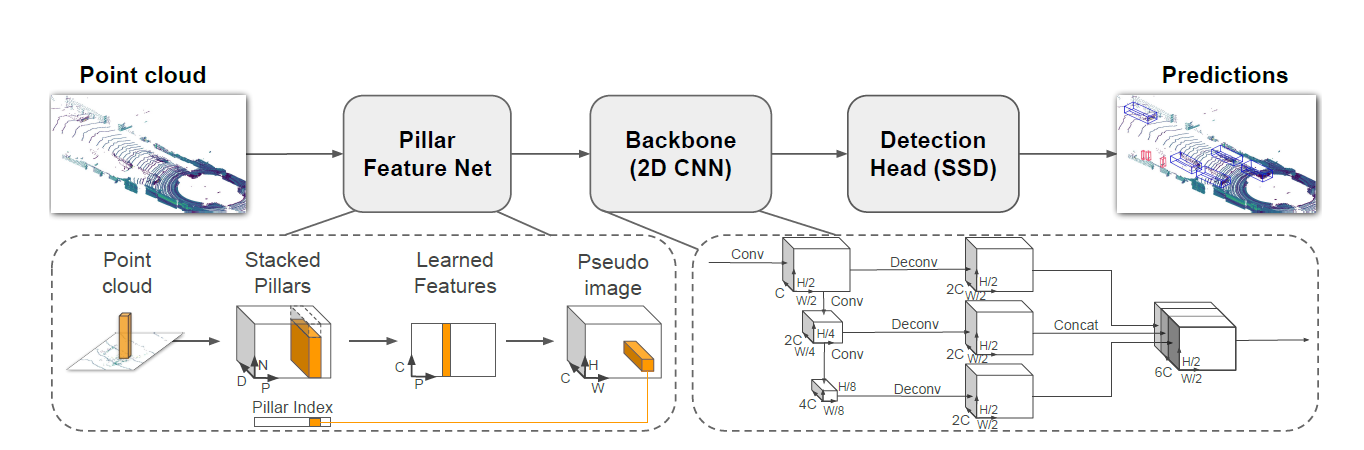
Objectives: The goal of creating a pre-processing pipeline for raw LiDAR data was to perform a coordinate system transformation to a so-called “birds-eye view” offering more valuable insights for object detection. Further stages of the pipeline transformed the vectors in order to match these datasets to the input of a 2D Convolutional Neural Network.